| Le s ujet |
Détection de Changement sur des Données Géométriques 3D
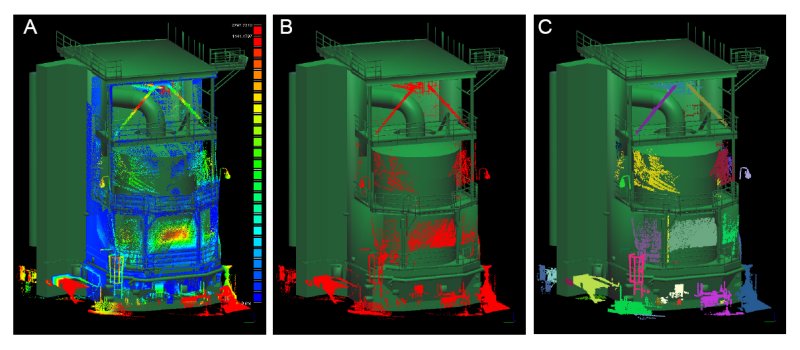
A: calcul d'écarts entre un nuage de points laser et un modèle 3D (bleu : différences faibles > rouge : différences maxiamles)
B : classification automatique des points "différents" (par filtrage statistique)
C : segmentation des zones de différence (extraction des composantes connexes)C'est une thèse CIFRE (i.e. "industrielle") encadrée par Telecom Paris (laboratoire TSI/TII) et EDF R&D (département SINETICS, équipe CAO & Réalité Virtuelle). Elle a été soutenue le 15 Mai 2006, à Telecom Paris.
Centre d'interêts :
- techinques d'acquisition en 3D : capteurs laser (lidar terrestre et aéroporté), photogrammétrie, radar.
- comparaison de nuages de points (avec d'autres nuages ou des modèles 3D/CAO), mesure des déformations, etc.
- traitements et affichage de gros nuages de points (octree, PCV)
- cartographie d'urgence
| Publications |
- "Detection de Changement sur des Données Géométriques 3D", D. Girardeau-Montaut, manuscrit de thèse, spécialité Traitement du Signal et Images, Telecom Paris.
- "Change Detection on Points Cloud Data acquired with a Ground Laser Scanner", D. Girardeau-Montaut, M. Roux, R. Marc & G. Thibault, ISPRS Workshop Laser Scanning 2005, Enschede, the Netherlands, September 12-14, 2005 (presentation pps).
- "Rendu en portion de ciel visible de gros nuages de points 3D", F. Duguet & D. Girardeau-Montaut, Journées AFIG (2004), Poitiers.
- "A Point-Based Approach for Capture, Display and Illustration of Very Complex Archeological Artefacts", F. Duguet, G. Drettakis, D. Girardeau-Montaut, J-L. Martinez and F. Schmitt, VAST (2004), pp. 1–10
| Comparaison de nuages de points |
Le principe général de la détection de changement géométrique en 3D est celui de la localisation et si possible de la caractérisation des changements géométriques survenus sur un objet (ou un ensemble d'objets) à partir de représentations 3D numériques de celui-ci. Ces représentations peuvent être partielles ou schématiques. Les changements structurels considérés sont : des déplacements, des deformations, ou enfin des phénomènes de disparition/apparition. Leur nature et leur cause peuvent être quelconques. Ils peuvent intervenir sur un même objet entre deux époques (changements temporels) ou bien entre deux objets ayant des structures théoriquement identiques ou proches (changements atemporels - on parlera d'ailleurs plutôt de différences que de changements dans ce cas).
Principe d'acquisition par scanning laser (gauche) - exemple de nuage de points résultant (droite)Les applications pratiques sont nombreuses. Voici celles sur lesquelles ce travail s'est focalisé :
- aide à la réalisation de documentation TQC (Tel Que Construit)
- suivi de chantier
- contrôle géométriques de grands ouvrages de génie civil.
- cartographie d'urgence (diagnostic des dommages, analyses de l'état des voies d'accés, planification des secours, detection des effondrements potentiels, suivi du chantier de déblaiement).
La modélisation de données ponctuelles 3D denses telles que celles acquises par capteur laser peut-être une tache difficile et lente, voire même impossible. On s'est donc intéressé dans le cadre de cette thèse à des techniques de calcul de d'écarts entre un nuage 3D trés dense et un modèle 3D (maillage) ou un autre nuage de points. On a proposé ensuite des algorithmes de segmentation des données 3D à partir de l'information de distance ainsi calculée.
Les principaux problèmes à surmonter sont :
- les différences de densité des nuages d'un scan à l'autre
- la description partielles des surfaces et les occlusions dans les données
- la taille des nuages qui peut atteindre des dizaines de millions de points 3D
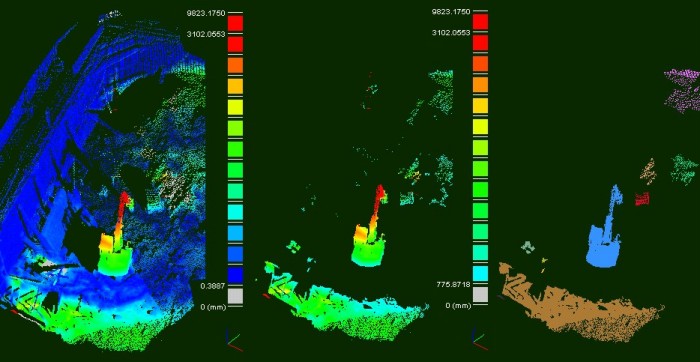
Voici un exemple de comparaison entre deux nuages lasers aquis sur un chantier à un jour d'intervale, puis d'extraction des objets "modifiés" :
et extraction des composantes connexes en 3D

| Le logiciel : CloudCompare |
Au cours de la thèse, j'ai initié le développement d'un logiciel de comparaison de données géométriques tridimensionnelles (et plus généralement de traitements divers applicables à des nuages de points 3D ou des maillages triangulaires). Il est dénommé CloudCompare et en est aujourd'hui à sa deuxième version. Son développement se poursuit actuellement sous la forme d'un projet "Open Source" :
| PCV (Portion de Ciel Visible) |
Le calcul d'éclairage en portion de ciel visible consiste à calculer pour chaque point d'un nuage (ou chaque sommet d'un maillage) l'angle solide de ciel vu par ce point. En somme, cela consiste à colorier chaque point en fonction de son horizon. L'idée est que dans un éclairage réel (du moins pour la partie directe de l'éclairage ambiant), les zones renfoncées reçoivent moins de lumière que des zones dégagées, et elles apparaissent donc plus sombres.
Les interêts de ce calcul d'éclairage sont nombreux (il est nécessaire en particulier pour le calcul d'éclairage réaliste, et est donc trés utilisé dans les studios d'animations et d'effets spéciaux). On retrouve alors les termes anglais équivalents de Skydome Rendering ou même d' Ambient Occlusion puisque c'est le même concept.
Pour ce qui me concerne, je l'utilise pour ses excellentes propriétés "perceptives" : les trés gros nuages de points sont difficiles à visualiser et analyser pour un oeil non averti, en particulier lorsqu'ils ne disposent d'aucune coloration ou information sur les normales des points. Un tel éclairage apporte une composante esthétique et réaliste qui améliore grandement l'appréhension du nuage et de sa géométrie. De plus, contrairement à un éclairage par normale, il fait beaucoup mieux ressortir la micro-géométrie de l'objet numérisé.
Voici 2 exemples : le premier est un exemple de résultat obtenu avec l'algorithme, lancé sur les 14 millions de sommets du célèbre modèle Lucy de Stanford (tout droits réservés) et considérés alors comme un simple nuage de point. L'autre est tiré du projet "Delphes 2004", (Cf. l'article présenté à VAST 2004) et qui a consisté en la numérisation d'une colonne antique par scanner laser.
Le rendu est ici fait avec un vieil algorithme peu performant (Cf. article présenté à l'AFIG en 2004). J'utilise aujourd'hui l'algorithme ShadeVis de Cignoni et al. (VCG/Softwares) qui s'avère être extrêment performant grâce à l'utilisation de la carte graphique. Bien que pensé pour être utilisé sur des maillages, les résultats sur un nuage de points suffisamment dense sont excellents.
(©,Stanford)
(©,EDF,Ecole Française d'Athènes)
vidéo (DivX - 6.13 Mo)Remarque : les images ci-dessus sont obtenues par affichage direct des points, et uniquement des points ...


| Liens |
- tsi.enst.fr - le site du laboratoire TSI de Telecom Paris
