| Subject |
Change detection on 3D Geometric Data
Application to emergency mapping.
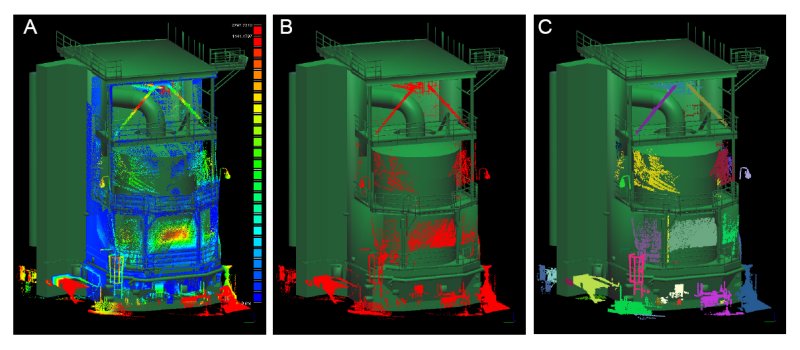
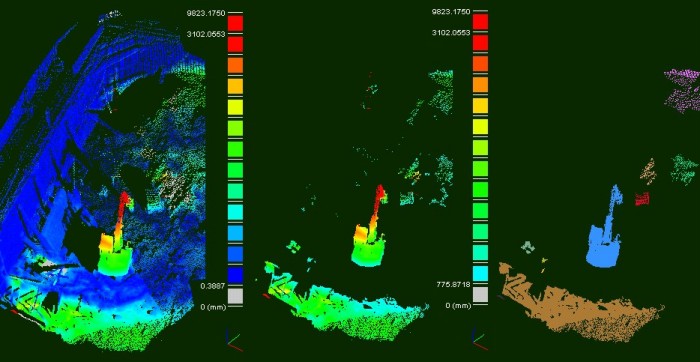
A: differences bewteen a laser point cloud and a 3D mesh (blue : small differences > red : highest differences)
B : automatic classification of "changing" areas (statistical & spatial filtering)
C : connected components labeling
As we say in french, this was an industrial PhD (CIFRE) which means that it was financed by a company. It has been tutored by Telecom Paris (TSI/TII lab) and financed by EDF R&D (SINETICS Dept., CAD & Virtual Reality team).
Major topics:
- 3D measurements acqisition: laser scanners (ground-based and airborne lidar), photogrammetry, radar.
- comparison of 3D data (cloud-to-cloud or cloud-to-mesh comparison), defects analysis, etc.
- display and analysis of huge point clouds (octree, skydome rendering)
| Publications |
- 2006
- "Detection de Changement sur des Données Géométriques 3D", D. Girardeau-Montaut, PhD manuscript (in french), Signal and Image processing, Telecom Paris.
- 2005
- "Change Detection on Points Cloud Data acquired with a Ground Laser Scanner", D. Girardeau-Montaut, M. Roux, R. Marc & G. Thibault, ISPRS Workshop Laser Scanning 2005, Enschede, the Netherlands, September 12-14, 2005 (pps presentation).
- 2004
- "Rendu en portion de ciel visible de gros nuages de points 3D", F. Duguet & D. Girardeau-Montaut, Journées AFIG (2004), Poitiers.
- "A Point-Based Approach for Capture, Display and Illustration of Very Complex Archeological Artefacts", F. Duguet, G. Drettakis, D. Girardeau-Montaut, J-L. Martinez and F. Schmitt, VAST (2004), pp. 1–10
| 3D data comparison |
There are several very interesting applications. Here are the ones we are focusing on during this PhD:
- 3D structural and shape analysis (CMM applications).
- reverse engineering of industrial blueprints.
- emergency mapping (damage detection, accessibility check, planification, pre-collapsing detection, clearing operations monitoring, etc.).
- comparison of numerical simulation results.
Main issues are:
- point sampling variations between point clouds
- partial sampling and hidden areas in laser scanned data
- typical laser clouds sizes (>10 M. points).
Here is an example of comparison and changing objects extraction in 3D between two clouds acquired on a building site with a ground based laser scanner (refer to the article submitted at Laser Scanning 2005):
(©,EDF R&D)
| The software: CloudCompare |
During this PhD, I have initiated the development of a 3D data comparison software (and more generally, point clouds and traingular meshes processing). It is named CloudCompare. The development is still going on, as an "Open source" project:
| Skydome rendering |
This section is related to my 2 first articles.
Here is 3 examples : the first one is an example on what the algorithm tipically produces on 14 millions of points, which in this case are taken from the well known model Lucy from Stanford. The two others are coming from a cultural heritage preservation project named "Delphes 2004" (please, consult the article submitted to VAST2004).
Today, I use the ShadeVis algorithm (Cignoni et al., VCG), which is really fast thanks to the intensive use of the graphic card processor. While having been developed for triangular meshes, it gives very good results on dense point clouds.
(©,Stanford)
(©,EDF,Ecole française d'Athènes)
(©,EDF,Ecole française d'Athènes)
video (DivX - 6.13 Mo)
(no video yet)
(no video yet)Note : these images are generated by displaying directly the 3D points, without any surface or triangle ...



| Links |
- tsi.enst.fr - the TSI laboratory, Telecom Paris
