CloudCompare Update List Message
From:
"CloudCompare Update List" <cloudcompare@PROTECTED>
Date:
October 26th 2014
A new version has been released. You'll find it here:
|
|
|
|||||||
 Windows 64
bits Windows 64
bits |
 |
 |
|
||||||
| Windows 32
bits |
|
|
|
||||||
 Mac OS 64
bits Mac OS 64
bits |
Thanks to Andy Maloney MacOS apps are available here | ||||||||
 Linux 64 bits Linux 64 bits |
Thanks to Romain Janvier packages for ubuntu/debian are available here | ||||||||
 Sources Sources |
git repository: https://github.com/cloudcompare/trunk (for compilation instructions, refer to the wiki) | ||||||||
A lot of work on this new release, with two new plugins, several new tools, and a lot of enhancements and bug fixes!
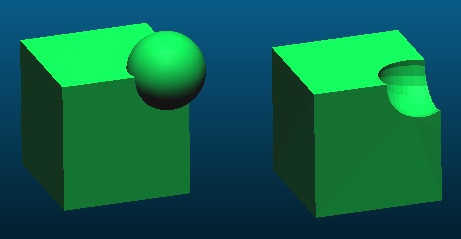
- New plugin: qCork
- to perform boolean operations on meshes (= Constructive Solid Geometry)
- allows to compute the difference, union or intersection of two CLOSED meshes
- based on the Cork library by Gilbert Bernstein (Stanford)
- current limitations:
- doesn't keep the mesh(es) attributes (color, nrormals, etc.)
- only
available on Windows
- New plugin: qFaro I/O

- to open Faro FWS/FLS files
- should be silently loaded by CC on startup: you can use the standard 'File > Open method or simply drag and drop the file on a 3D view
- only available on Windows (installer version)
New methods:
- Tools > Clean > Noise filter
- this tool is similar to qPCL plugin's SOR filter (Statistical Outliers Filter) but with more options:
- possibility to set a (sphere) radius for the nearest neighbors search instead of a fixed number of points (much better if the cloud density is not constant)
- possibility to set an absolute error instead of a relative error
- option to remove isolated points
- Edit > Mesh > Flag vertices by type
- mesh quality measurement tool
- flags all the vertices of the mesh (with a dedicated scalar field) with different values depending on whether they are belonging to a standard edge (0), to an edge on a hole border (1) or to a non-manifold edge (2)
- displays
in the console the total
number of each type of edges (normal/hole border/non-manifold) as well
as the total number of edges
- Edit > Mesh > Measure volume
- mesh volume measurement tool
- the result is only valid if the mesh is closed (CC will warn you if it's not the case - and you can check that yourself with the new 'Flag vertices by type' method)
- Meshes can now be exported to DXF (Autocad) files
- New 'Display' options:
- 'Display > Lock rotation around vert. axis' to lock the manual rotation around the screen vertical axis (shortcut: 'L')
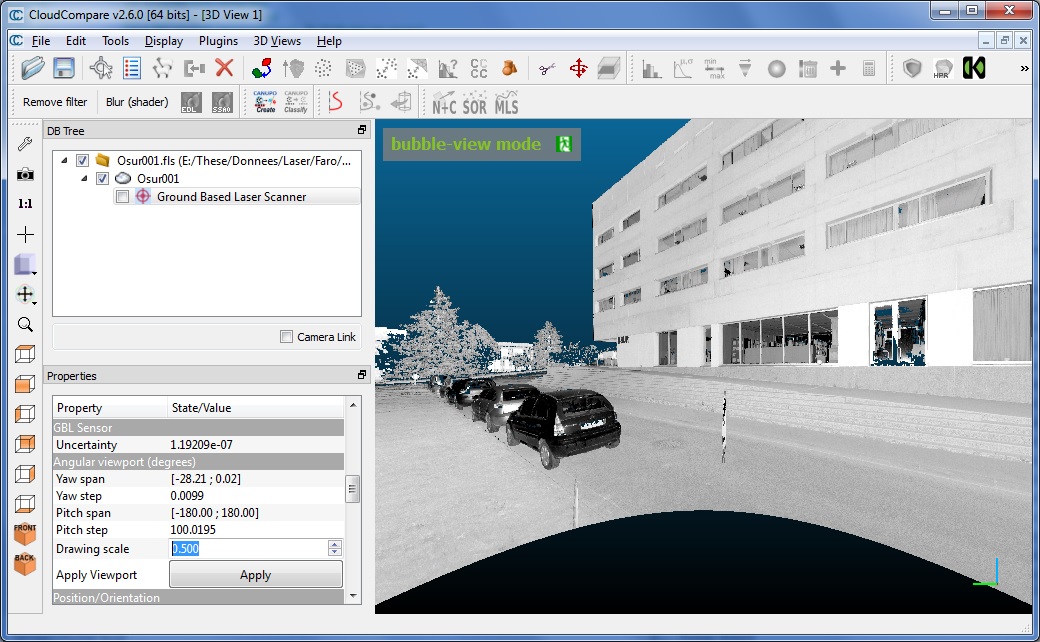
- 'Display > Enter bubble-view mode' to enable 'bubble-view' mode, akind of viewer-based perspective mode blocked on the current camera position, with Z axis locked and a high field of view by default (shortcut: 'B'). This is the new default mode enabled when clicking on the 'Apply' button of a TLS/GBL sensor (typically opened with a PTX or Faro file for instance)
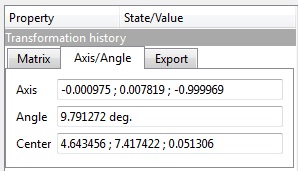
- New feature: "Transformation history"
- all rigid transformations applied to any 3D object are now 'tracked'. In practical they are accumulated in a history transformation matrix for each entity.
- for instance this allows to easily determine the global transformation applied to an entity since loading time (even after multiple manual transformation or automatic registration steps)
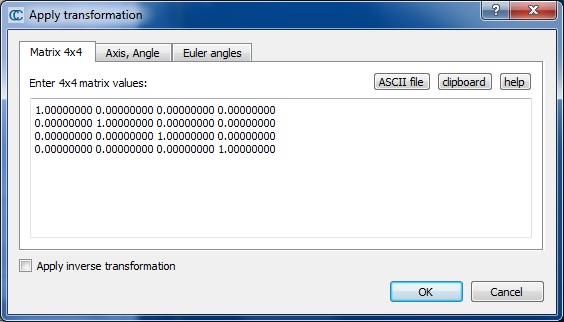
- a dedicated widget ('Transformation history') has been added to the the 'Properties' dialog. This widget displays the matrix either as a "standard" 4x4 matrix, or as a rotation axis associated to a rotation angle and a translation vector. This widget also allows the user to copy the matrix to the clipboard or to save it as a text file (for opening it later in 'Edit > Apply transformation' for instance)
- New buttons in the 'Apply Transformation' dialog:
- 'ASCII file' to import a transformation matrix from an ASCII file (see above)
- 'Clipboard'
to paste the clipboard
contents (hopefully corresponding to a transformation matrix ;)
Enhancements:
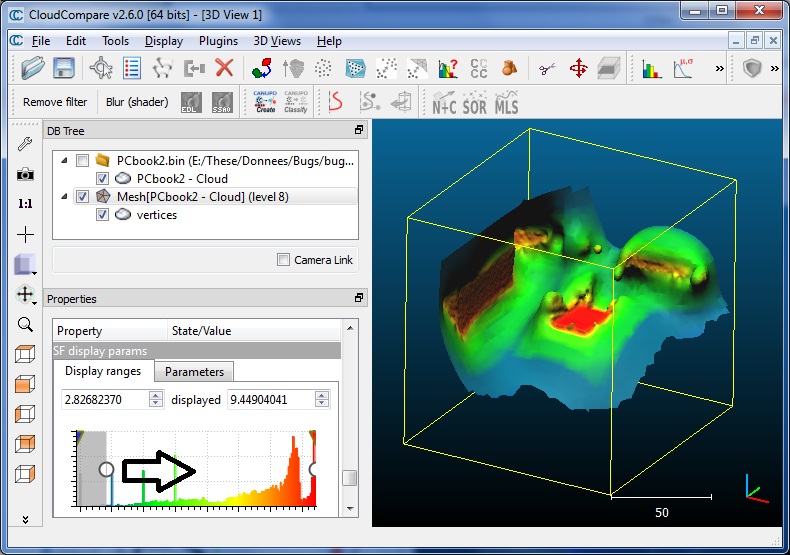
- For 64 bits versions, the max octree depth is now 21 instead of 10
- this way CC will be more efficient with clouds above 20 or 30 M. points.
- the resulting increase in memory consumption shouldn't be an issue for recent computers (the new octree needs 12 bytes per point instead of 8, which corresponds to an increase of 380 Mb for 100 M. points)
- The 'Edit > Merge' method now works with meshes
- qPoissonRecon upgraded:
- now uses the latest PoissonRecon version 6.11
- screening is now activated by default
- the user can now choose to output the 'density' parameter as a SF (this let him reduce the output mesh extents afterwards)
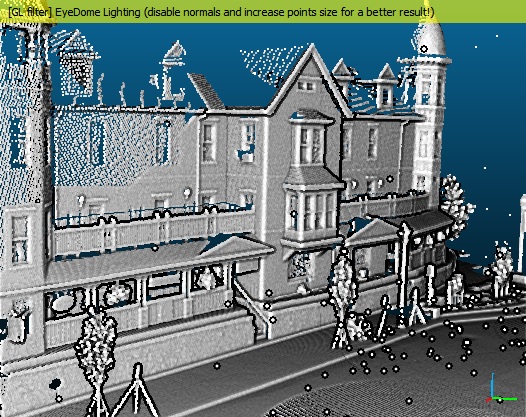
- qEDL (Eye Dome Lighting) now behaves correctly even in perspective mode!
- Point picking tool:
- the vector coordinates have been restored in the 2-points labels
- Texture handling:
- textures are now handled in a much smarter and proper way (OBJ/PLY/FBX formats)
- less
memory consumption + original
filenames are preserved
- FBX file format:
- materials
and texture are now
supported (input/output)
- New options in the Bundler import dialog:
- choose the keyponts/orthophotos vertical axis with radio buttons (X, Y, Z and Custom)
- choose the ortho-rectification method:
- optimized: the 'classic' method based on CC's own parameter optimization process
- direct:
an alternate method based only on Bundler's output parameters
- qSRA (Surface of Revolution Analysis) plugin:
- the triangles of the exported meshes (surface of revolution textured with the displacement map) are now in the right order
- memory
leak fixed (when displaying a
conical projection map)
- ASCII import/export:
- RGB colors can now be imported or exported as float values (between 0 and 1) instead of unsigned bytes (0-255)
- new 'Apply' button (replaces 'Ok')
- new 'Apply all' button
to attempt to
load all the files with the same parameters
- PLY import:
- new 'Apply' button (replaces 'Ok'): the dialog will remember the previous configuration and will try to restore it the next time
- new 'Apply all' button :
the dialog is
skipped whenever CC can successfully restore the previous configuration
while opening new files
- PTX import:
- grid translation is now checked against 'big coordinates' (Global Shift & Scale mechanism)
- cancel button also cancels the normals computation!
- sensors corresponding to each scan are automatically created
- CC will now ask the user if the normals should be computed or not
- when
loading PTX file from the command
line, normals are not computed by default. Use the
option '-COMPUTE_PTX_NORMALS' to force their computation.
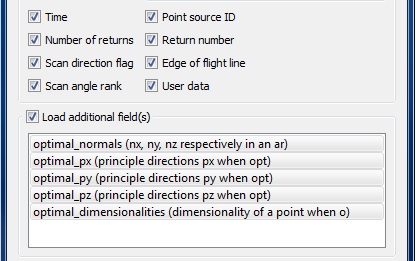
- LAS import:
- CC now handles LAS 1.4 files: the dialog has a new section that allows the user to load the custom fields defined in the LAS file 'extra bytes' section
- VTK import:
- VTK I/O
filter is now smarter and can
read Paraview VTK files with multiple elements per line
- PCL import/export:
- now fully integrated in the main application (if the qPCL I/O plugin is successfully loaded)
- all PCD files can be loaded and saved via the standard 'File > Open' and 'File > Save' menu entries
- the equivalent icons of the qPCL plugin has been removed
- ccViewer
can also load PCD files
- 'Edit > Sensors' menu has been reorganized
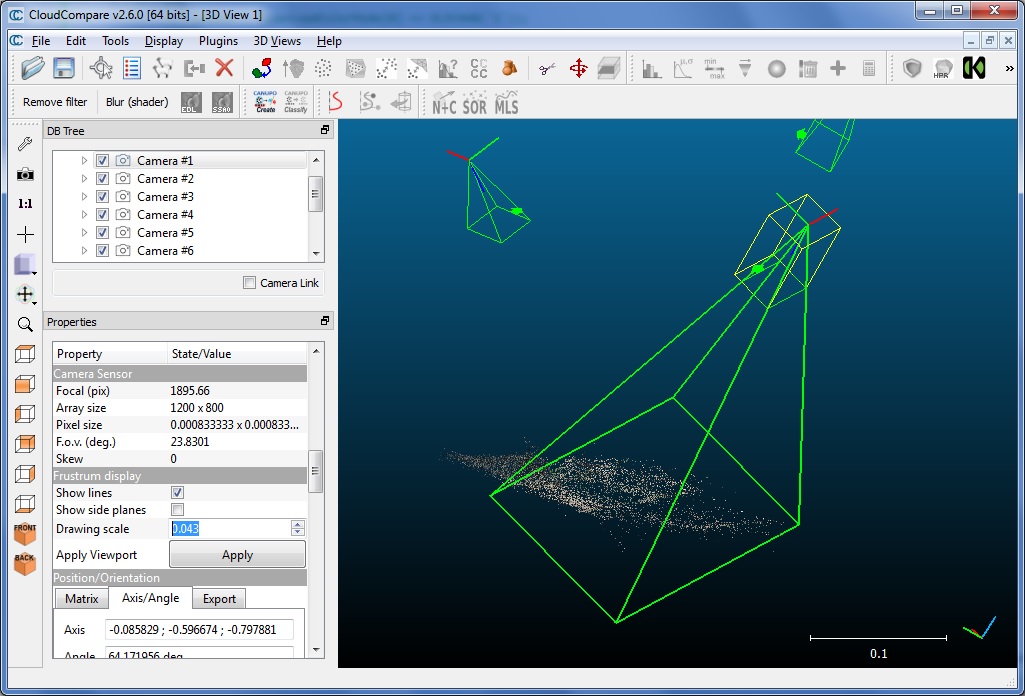
- Camera sensor management enhanced:
- camera sensors are now created automatically when clouds are loaded from Bundler or ICM files
- a dialog let the user create or edit camera sensors
- the camera symbol in 3D is fully configurable (display scale, with or without frustum, etc.)
- camera sensors (and images) can now be saved in BIN files
- the 'Camera Sensor > Project uncertainty' and 'Camera Sensor > Compute points visibility' are now smarter and can be applied on any point cloud
- Ground Based Laser sensor management enhanced:
- GBL sensors are now created automatically when clouds are loaded from PTX or Faro files
- the user can now apply the GBL sensor 'viewport' to the 3D display ("bubble view' mode) with the 'Apply' button in the sensor properties
- the sensor symbol in 3D is now correctly centered on the optical center (and can be used with the magnifier icon to zoom/focus on it)
- 'Theta' and 'Phi' are replaced by the clearer 'Yaw' and 'Pitch' names
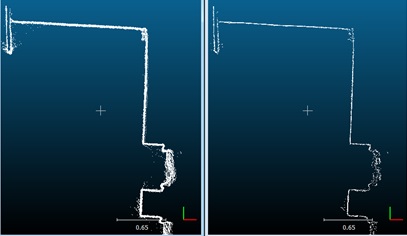
- 'Edit > Sensor > View from sensor' method is now cleverer
- 'Edit
> Sensor > GBL
Sensor > Show depth map' is now cleverer
- Camera parameters dialog:
- should not 'disconnect' from the current 3D view anymore
- new setting: 'zNear relative position' to change the position of the near clipping plane in perspective mode (due to the way near and far clipping planes are handled in CC, this is only a relative position, and it cannot be set at any given depth)
- New keyboard shortcuts:
- 'A' to toggle all selected entities activation (i.e. enable/disable state)
- 'L' to lock the rotation around the Z axis
- 'B' to
enter bubble-view mode
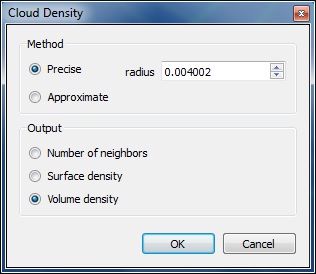
- Density computation:
- only one method now with a dedicated dialog:
- ability to choose either the precise or approximate methods
- ability to choose how the density should be computed (number of neighbors, surface or volume)
- Command line mode:
- New options:
- '-FBX_EXPORT_FMT' to specify the format when exporting meshes to FBX. Available formats are currently (FBX_binary, FBX_ascii, FBX_encrypted, FBX_6.0_binary, FBX_6.0_ascii, FBX_6.0_encrypted). If not set CC will display a message box to let the user select the output format (even in command line mode ;)
- '-AUTO_SAVE' + ON/OFF: to set whether output clouds or meshes should be saved after each applied algorithm (currently ON by default)
- '-COMPUTE_PTX_NORMALS' to force CC to compute normals when loading PTX files
- new option after 'SAVE_CLOUDS' or 'SAVE_MESHES': 'ALL_AT_ONCE' to tell CC to (try to) save all loaded clouds (resp. meshes) in a single file. The format must support this features (i.e. BIN or E57 for clouds, BIN or FBX for meshes)
- new option '-TYPE' (after '-DENSITY' or '-APPROX_DENSITY') to specify the type of density to compute
- options are: KNN (number of neighbors), SURFACE (surface density) or VOLUME (volume density)
- Global Shift can now be configured when opening a file in command line mode:
- after '-O' (open file) use the '-GLOBAL_SHIFT' option and:
- either 'AUTO' to let CC handle the big coordinates automatically
- or the 3 values of the shift vector to apply
- example: 'CloudCompare -O -GLOBAL_SHIFT AUTO myfile.asc'
- The default timestamp for output files now incorporates seconds (so as to avoid overwriting files generated too quickly)
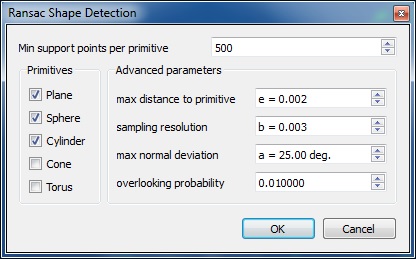
- qRansac Shape Detection plugin:
- parameters have been updated so as to be (much) clearer
- CC now
detects points with NaN (not a number) coordinates and will
automatically
replace them by (0,0,0) to
avoid (big) issues later
- The parameters of some primitives can now be interactively changed:
- Sphere
(radius), Cone (height, bottom
radius, top radius) or Cylinder (height, radius) can now be modified
directly via the 'Properties' dialog
- New 'sand-box' methods:
- Tools > Sand box > Create cloud from selected entities centers
- Tools
> Sand box >
Compute best registration RMS matrix
- Point list picking tool:
- new
checkbox to display the global
coordinates (instead of shifted ones) for shifted clouds
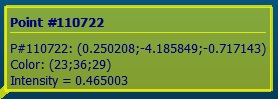
- 2D Labels:
- for points with an associated scalar value, the scalar field name is used instead of 'Scalar' (e.g. 'Density = 1.23' instead of 'Scalar = 1.23')
Bug fixes:
- the spinboxes of the bounding-box editing dialog were oversized
- the 'Cancel' button of progress dialogs was invisible on the x64 version
- in some very limit cases, the distance computation could enter in an infinite loop
- qSRA: memory leak fixed (when displaying a conical projection map)
- the 'original' coordinates displayed in 2D labels (or in the console for picked points) was wrong (global shift was applied in the opposite way)
- the global shift/scale infos were wrongly applied when exporting points picked with the 'Point list picking' tool
- for some clouds loaded from an ASCII file and with very particular sizes, the associated scalar fields size could be wrongly set (while the data was correctly loaded) and CC wouldn't accept to display them...
- memory leak when loading PTX files
- starting the 'Manual Segmentation tool' (scissors icon) in perspective mode could dramatically change the EDL rendering (anyway, using EDL in perspective mode is not really supported yet ;)
- qPoissonRecon: the multi-threaded version (i.e. the 32 bits version on Windows) could crash sometimes
- 3D mouse: on some configurations, the 3D mouse was not handled properly
- the global shift information was not applied to the cameras when importing Bundler files with large coordinates
- saving E57 files could make CC crash sometimes (due to an internal inconsistency in libE57) - CC is now more robust to this kind of errors!
- 3D names now follow the entity when they are interactively translated (scissors tool)
- cloud cloning was not preserving the point size
- when manually segmenting a mesh, its textures could be wrongly released from the OpenGL context (causing display errors in the best case)
- funny things
(crash, etc.) could happen when choosing another option
than 'leave empty' to fill empty cells in the Rasterize tool...
And last but not least, you can make donations to the project via'Pledgie':

Enjoy,
CloudCompare Admin
PS: if you can't read properly this message, you can read it here: http://www.cloudcompare.org/release/notes/20141026/cc_release_notes_20141026.html

- This mailing list is a public mailing list - anyone may join or leave, at any time.
-
This mailing list is announce-only.
To be informed of the last CloudCompare official release
Privacy Policy:
This mailing list is used to keep you and others informed about the last CloudCompare updates. We do not share or sell your information to any third parties.
If you have any question or concerns, please contact us at admin@cloudcompare.org.
