CloudCompare Update List Message
From:
"CloudCompare Update List" <cloudcompare@PROTECTED>
Date:
April 25th 2016
(Sorry for those who received this message twice - the first batch has partially failed)
A new version has been released. You'll find it here:
|
|
|
|||||||
 Windows 64 bits Windows 64 bits |
 |
 |
|
||||||
| Windows 64 bits Stereo (support for NVidia 3D Vision and Oculus Rift) |
|
|
|
||||||
 Mac OS 64 bits Mac OS 64 bits |
Thanks
to Andy Maloney, MacOS apps are available here Note that Retina and other high-dpi displays are not supported. |
||||||||
 Linux 64 bits Linux 64 bits |
Thanks to Romain Janvier, packages for Ubuntu/Debian are available on Bintray (soon) | ||||||||
 Sources Sources |
git repository: https://github.com/cloudcompare/trunk (for compilation instructions, refer to the BUILD.md file) |
||||||||
 The
The
Your support is greatly appreciated. Many thanks to all our supporters who made donations on pledgie!

The 2.7 version is ready!
It's a great step forward for the project, with a lot of modifications behind the scenes:
- support of the newest operating systems (Windows 10, Mac OS 10.10 and Ubuntu 16.04)
- better rendering of big point clouds thanks to a new LOD mechanism, better reactivity, much faster Cross Section tool, etc.
- support for NVidia 3D glasses and the Oculus Rift headset (on Windows with the Stereo version)
- loads of improvements and bug fixes
Special thanks to Andy Maloney and Romain Janvier for their big involvement.
Here are the new features:
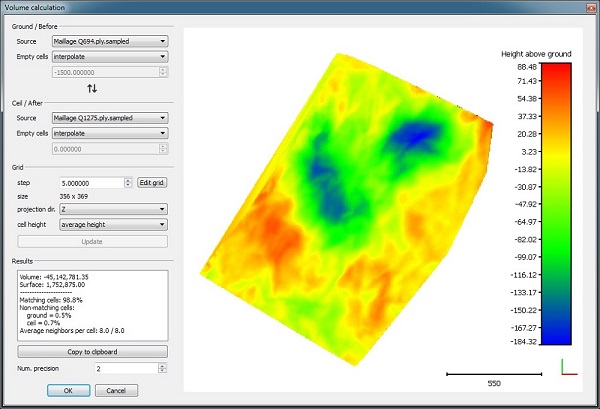
- New tool: 'Tools > Volume > Compute 2.5D volume'
- to compute the volume between two clouds or between a cloud and a plane (along a principal direction)
- the tool projects the points in a 2.5D grid (therefore the interface is similar to the 'Rasterize' tool)
- it outputs several other statistics (added/removed volume, surface, etc.)
- see http://www.cloudcompare.org/doc/wiki/index.php?title=2.5D_Volume
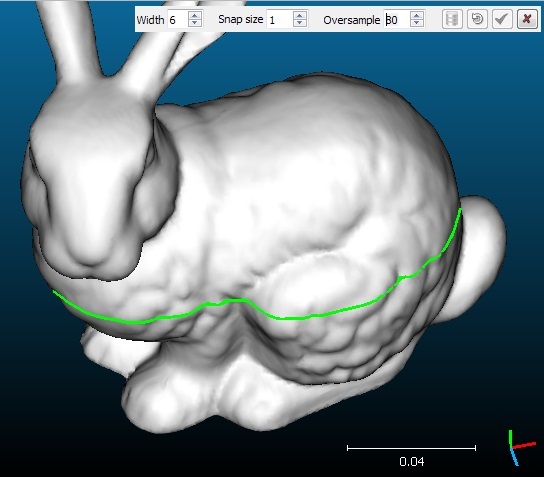
- New tool: 'Tools > Trace polyline' (Thanks to Luca Penasa)
- also accessible via a dedicated icon in the main tool bar ('Trace a polyline by point picking')
- allows to pick points on all the visible entities (mesh or clouds) in the active 3D view to 3D polylines
- allows to generate a tight contour by automatically picking several points between each vertex ('oversampling')
- see http://www.cloudcompare.org/doc/wiki/index.php?title=Trace_polyline
- Support for the NVidia 3D Vision glasses (thanks to Amfax - www.amfax.co.uk)
- new option of the 'Stereo' mode (you have to use the 'Stereo' version of CloudCompare)
- the graphic card must support OpenGL quad buffering (i.e. latest GeForce or Quadro cards)
- the 3D stereo mode must be enabled in the NVidia Control Pannel
- the screen frequency must be manually set to the right frequency (i.e. 100 or 120Hz)
- (the 3D view is forced to exclusive full-screen mode)
- shaders (EDL, etc.) are supported

- Support for the Oculus Rift device
- new option of the 'Stereo' mode (you have to use the 'Stereo' version of CloudCompare)
- development is still in 'alpha' state
- units must be expressed in meters
- works best with a 3D mouse
- works best in 'bubble view' mode (i.e. with FARO or PTX files)

- New method: 'Edit > Colors > Convert to grey scale'
- New tool: 'Tools > Sand-box > Distance Map'
- allows to compute distance maps for clouds (= distances from regularly sampled positions in a grid)
- the output points can be filtered inside a specified distance range
- Exclusive full screen mode for 3D views
- Makes the active 3D view full screen (shortctut: F11)
- The shortcut for the former 'application' full screen mode is now F9
Here is the (huge) list of improvements
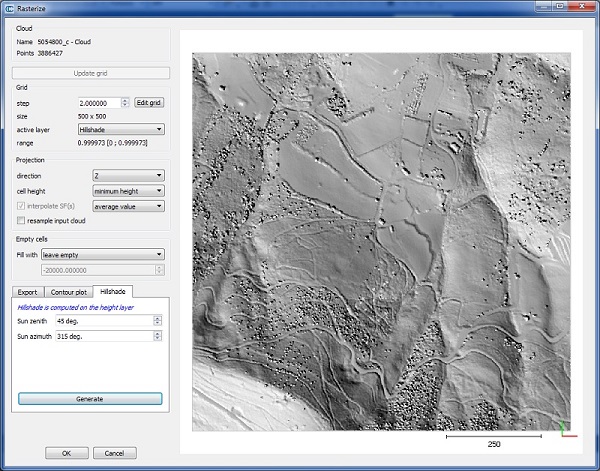
- Rasterize tool
- can now compute Hillshade
- now handles RGB colors
- raster export dialog updated
- now exports images with the active (default) color scale
- the 'resample' option can now be used with the 'average height' projection. In this case only the coordinates of the original point are kept (the point which is the closest to the cell center) and the height is replaced by the average cell height.
- the 'Cancel' button of the grid update progress bar is now properly taken into account
- LOD mechanism enhanced (faster and smarter)
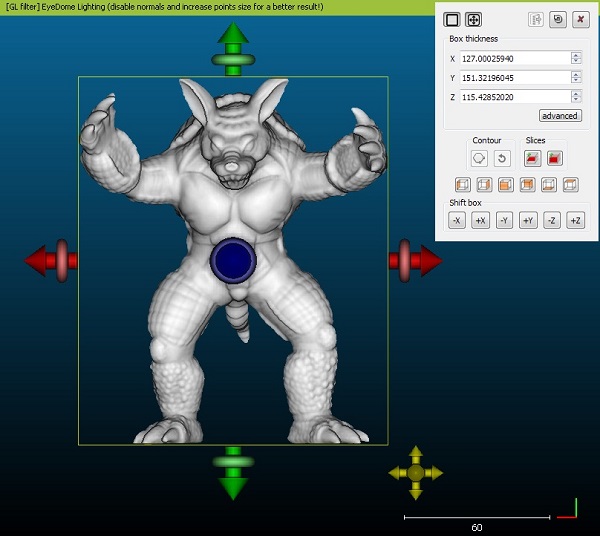
- Cross section tool
- now based on OpenGL for a much faster display (+ proper integration in the new LOD mechanism)
- the box orientation can now be setup via the 'advanced' button
- new button to hide the clipping-box
- new button to restore the previous clipping-box settings (per-entity)
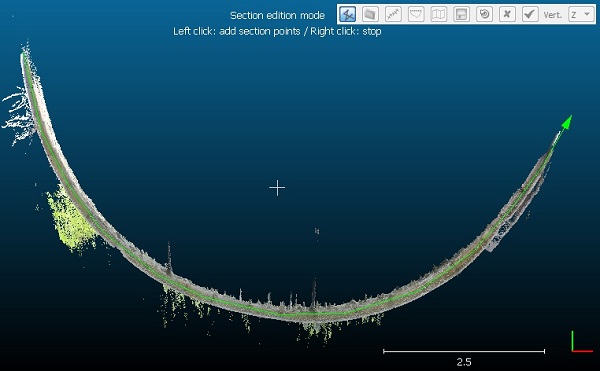
- Section Extraction tool
- new 'Unfold cloud' option: lets the user 'unfold' the cloud along the active polyline (very useful to unwrap a cloud that has not a cylinder shape)
- the tool now keeps the active GL filter active (if any)
- see http://www.cloudcompare.org/doc/wiki/index.php?title=Extract_Sections#Unfolding_a_cloud_along_a_polyline
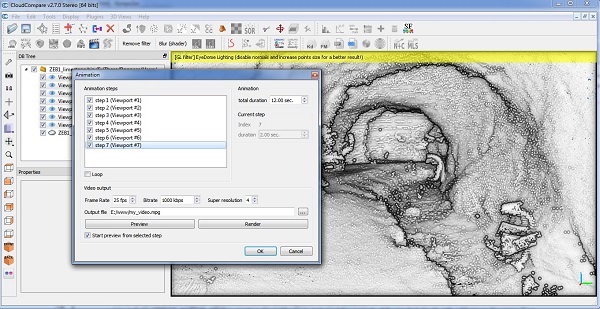
- qAnimation
- the plugin has been fixed and can now output mp4 videos
- the user now sees all the viewports in the list and can enable/disable each one separately
- new 'loop' option (to close the loop)
- the preview can be started from the selected step (see dedicated checkbox)
- new 'super resolution' option (to smooth the output video)
- Global Shift mechanism
- The 'Global Shift & Scale' dialog now allows for shifting values above 1.0e9 (for georeferenced clouds expressed in millimeters!)
- default triggering value (for the coordinates) have been lowered to 10^4
- New 'File > Global Shift settings' dialog
- can be used to set the limits that trigger the 'Global Shift & Scale' mechanism
- settings are persistent
- settings are used for both the standard application and the command line mode
- Bubble View mode
- now allows for horizontal AND vertical rotation
- the 3D mouse is now properly handled
- Command line mode
- I/O plugins are now loaded in command line mode (i.e. the FARO, DP and PCD formats can now be used)
- new option 'MAX_TCOUNT' to specify the maximum number of threads to be used for computing distances (C2C or C2M) as well as for ICP registration
- the SPLIT_XYZ and MAX_DIST options can now be used together for C2C distance
- new option '-ORIENT_NORMS_MST' (+ number of neighbors): to (re)orient the normals of the loaded clouds with a Minimum Spanning Tree
- new option '-SF_OP' (+ SF index + operation + scalar value): to add / sub / multiply or divide a scalar field by a constant value
- new option '-DROP_GLOBAL_SHIFT': to drop the Global Shift information of all loaded entities
- Distance computation
- C2C distance can now be split along the 3 dimensions (X, Y, Z) even when using local models or a maximum distance (in which case some values may be NaN)
- the user can now set the maximum number of threads/core to use
- Point-pair based alignment tool
- the tool 3D view now has the same viewport/camera parameters as the source 3D view
- the user can now set the max RMS for sphere detection
- Sensors
- Sensors (camera, TLS) are now properly updated when their associated cloud is scaled
- principal point added to Camera sensor parameters
- differentiation of the vertical and horizontal focal lengths for Camera sensors
- SF Arithmetic tool
- a constant value can now be used instead of a second scalar field
- the first scalar field (SF1) can now be updated directly (instead of creating a new SF)
- division by zero is now properly handled
- M3C2 plugin
- new option to output the scalar fields (distance, confidence, etc.) on the original core point entity (i.e. either the original cloud or the subsampled version)
- the user can now set the maximum number of threads/core to use
- CANUPO plugin
- the statistics (Training mode) now takes the actual boundary into account (and not the default one)
- bug fix: the classes (labels) could be inverted in some cases
- the user can now set the maximum number of threads/core to use
- The DP I/O plugin can now export DP files
- either to save original DP files
- or to convert other structured clouds (FARO or PTX for now) to the DP format
- File I/O
- E57: big coordinates are now properly handled (Global Shift & Scale mechanism)
- smarter progress dialogs
- Mac OS X (thanks to Andy Maloney - https://asmaloney.com)
- adds support for OpenGL Frame Buffer Objects (FBOs)
- adds support for the CSV Matrix I/O file format
- adds support for the following plugins: qFacet and qAnimation
- Various
- ICP registration: the user can now set the maximum number of threads/core to use
- The 'Edit > Multiply / Scale', 'Tools > Registration > Match bounding-box centers' and 'Tools > Registration > Match scales' methods now update the 'transformation history matrix' of the entities
- The default (sun) light position is now in the middle of the screen so as to get a brighter visualization of meshes
- The 'Link camera' checkbox has been moved to the 'Display menu'
- Camera sensors can now be created 'freely' (i.e. not necessarily attached to a given entity) and moved freely in the DB tree
- qPoissonRecon now uses PoissonRecon V8.0 (https://github.com/mkazhdan/PoissonRecon)
- Point sampling (on a mesh): maximum density is now 100 M. per square units
- Structured point clouds: the sensor position of associated scans is now properly updated when the cloud is rotated
- the FARO I/O plugin now relies on the 5.5.3 FARO LS SDK
And last but not least, here are the bug fixes:
- The HSV to RGB method was broken
- The 'Convert normals to HSV colors' mehod doesn't rely on the Dip / Dip direction anymore as the way these values are computed have been changed recently (with a symmetry about the plane Z = 0)
- When playing with the 'skip lines' parameter of the ASCII file loading dialog, the roles assignments could be cleared (when a line was reappearing while it had less elements than the other lines)
- The meshes over the user-specified limit (display options) were ALWAYS decimated (and not only when the mouse was moved)
- 2D area label picking was broken (first corner was misplaced)
- 3D point picking on a cloud with a temporary GL transformation (e.g. in the Align tool) was not working properly
- The camera sensor dialog was presenting the camera orientation vectors in the wrong order (horizontal instead of vertical)
- OpenMP support disabled for Ransac Shape Detection on Windows (the process loops infinitely if enabled)
- When custom labels were defined for a custom color scale, the values that were not present in the active SF range were ignored
- The 'Edit > Colors > Convert to Scalar Field' method was returning invalid scalar fields
- The 'ADD_HEADER' and 'ADD_PTS_COUNT' options of the command line mode were causing an infinite loop
- The point-pair based alignment tool could sometimes fail (especially when there were at least 4 picked points almost all in a plane)
- CC 2.6.2 would crash when loading older BIN files containing primitive cylinders
- FARO files: the sensor position associated to each grid/scan structure was wrong. This could lead to a wrong orientation when computing normals.
- The rasterize tool was placing the points at the lower-left corners of the cells when exporting the grid as a cloud (instead of the centers of the cells)
- The window picking slots were not properly disconnected after each session of the manual segmentation tool (at least) causing the tool to slow down each time it was restarted
- Polylines vertices could be dragged and dropped or deleted (potentially causing a crash)
- For clouds with a number of points that is exactly a multiple of 65536, the last 65536 points were not displayed
- OpenGL warning removed when rendering a 3D view to a file (or as an animation with the qAnimation plugin)
- Command line mode: the mesh obtained with the -DELAUNAY command could only be saved as a BIN file
- Rasterize: applying the tool a second time on a cloud already generated with the rasterize tool could make CC crash
- E57: some files may be rejected due to a minor warning (about duplicate extensions) that was considered as a critical error
- Mac OS X properly saves and restores the main window's state & geometry
- Mac OS X uses the standard menu names and keyboard shortcuts for entering and exiting full screen
And of course, you can make donations to the project via'Pledgie':
Enjoy,
CloudCompare Admin
PS: if you can't read properly this message, you can read it here: http://www.cloudcompare.org/release/notes/20160423/index.html

- This mailing list is a public mailing list - anyone may join or leave, at any time.
-
This mailing list is announce-only.
To be informed of the last CloudCompare official release
Privacy Policy:
This mailing list is used to keep you and others informed about the last CloudCompare updates. We do not share or sell your information to any third parties.
If you have any question or concerns, please contact us at admin@cloudcompare.org.
