Page 1 of 1
Visibility of points from TLS/GBL sensor
Posted: Tue Dec 13, 2022 9:40 pm
by Marc.P
Hello,
I'm trying to to determine the visibility of points from a virtual sensor, but all points within the sensor vision range seem to be visible, even the ones theoretically hidden.
This behaviour can be replicated (cloudcompare v.2.12.14) by creating a sphere of radius 2 with center at 0, 0, 0. Then, I sampled points on the sphere (density=10 000), and created a TLS/GBL at (0, 0, 3), with default parameters. When I then compute points visibility, the are all labelled with 0. I would expect points with z<0 not to be visible, because they are hidden by points with z>0.
Am I doing something wrong?
Thank you for your help!
Regards,
Marc
PS : Another problem that I see is that the max range parameter seems to be chosen by default as the maximum distance between points from the point cloud, and the sensor. The value chosen at sensor creation, or edited afterwards, is not retained.
Re: Visibility of points from TLS/GBL sensor
Posted: Fri Dec 16, 2022 9:28 am
by Marc.P
Hi,
To give some perspective, my objective was to "clean" a pont cloud by keeping points visible only from the outside. So I wanted to compute visibility from various synthetic sensor positions, and merge the different reconstructed clouds. But that can actually be achieved with the Hidden Points Removal plugin, so my problem is solved.
But I'm still curious to know if I did anything wrong when I tried to use sensors.
Thanks anyway for this great software!
Best,
Marc
Re: Visibility of points from TLS/GBL sensor
Posted: Fri Dec 16, 2022 10:01 pm
by jdv56a
A manual way of knowing the visibility of a point from the sensor is from the normals, calculating the vector product of the position vector of each point with respect to the sensor with the normal.
Edit-Scalar Fields-Export Coordinates
Edit-Scalar Fields-Export Normals
Arithmetic
Visibility=(Coord.X - TLS.X)*Nx + (Coord.Y - TLS.Y)*Ny + (Coord.Z - TLS.Z)*Nz
After filtering, if the result is positive, it is not visible, if the result is negative, the point is visible.
Re: Visibility of points from TLS/GBL sensor
Posted: Sat Dec 17, 2022 8:24 am
by daniel
Interesting work around.
Still, I'll try to investigate the issue reported by Marc.P ... as soon as possible ...
Re: Visibility of points from TLS/GBL sensor
Posted: Sat Dec 17, 2022 9:41 am
by daniel
Ok, so I looked at this 'issue' right away.
1) Mind that the sensor is looking towards its own 'X' direction (red), so you have to set the right orientation to the sensor so it looks towards the sphere:
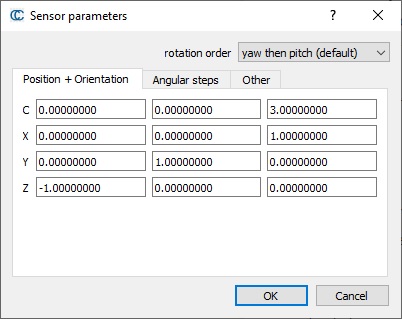
- cc_sensor_params.jpg (39.17 KiB) Viewed 8087 times
2) A sensor created manually will automatically have their 'min' and 'max' angles set so that all the points of the associated cloud are visible (they can go up to 360 degrees, as some real scanners do).
3) By positioning the sensor outside of the sphere (0, 0, 3), I'm not sure why you were expecting to have points with negative z values (even with respect to the sensor)
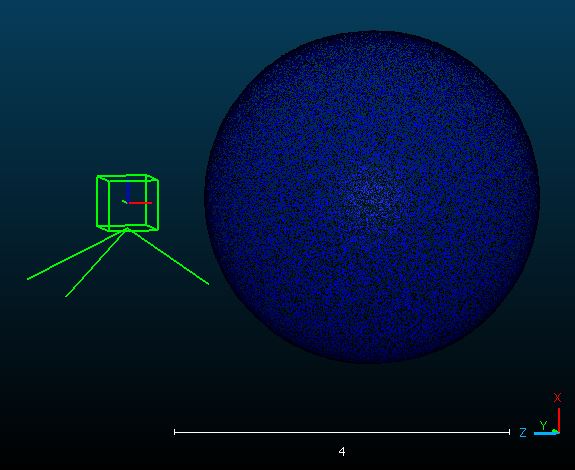
- cc_sensor_outside.jpg (41.23 KiB) Viewed 8087 times
All in all, I'm not sure you'll be able to achieve what you are trying to do this way? The 'HPR' plugin might be helpful though (see
https://www.cloudcompare.org/doc/wiki/i ... l_(plugin)). You can create the sensor, apply its viewport (with its 'Apply' button in its properties), then select the cloud and run the HPR plugin).
Re: Visibility of points from TLS/GBL sensor
Posted: Mon Dec 19, 2022 2:22 pm
by Marc.P
Hi,
Thank you for your answers.
@jdv56a : Interesting indeed, but in my case my objective was actually to get a "clean" cloud to then compute "clean" normals".
@daniel : yes sorry about that, the orientation was indeed not good. So now my position and orientation matrix is the same as in your message.
But when I compute visibility, I get only the value 4 (out of fov). Shouldn't it be 0 (visible) for points on the sphere with positive z coordinates (they are in front of the camera), and 1 (hidden) for points on the shpere with negative coordinates, as they are hidden by points with positive z coordinates?
The 'HPR' plugin might be helpful though (see
https://www.cloudcompare.org/doc/wiki/i ... l_(plugin)). You can create the sensor, apply its viewport (with its 'Apply' button in its properties), then select the cloud and run the HPR plugin).
Yes, that's what I finally did, thanks!